多智能体的协同控制是群集智能无人系统研究的一个重要方向,在多机器人协作、分布式优化计算、分布式信息融合、社会网络、智能电网等多个领域得到了广泛的应用。在多智能体的协同控制研究中,收敛速率是衡量控制算法性能的重要指标。大量研究工作表明利用记忆信息来设计控制算法可以提高收敛速率。但是,仍存在一些关键科学问题亟待解决。例如:是否利用更多的记忆信息就能达到更快的算法收敛速率?记忆加速算法所能达到的收敛速率优化上限是多少?对应的最优控制参数如何设计?由于记忆加速算法的计算复杂度高,上述问题均无解析求解方法。
针对上述难点问题,我们借助Kharitonov稳定性理论、Routh-Hurwitz稳定性判据和鲁棒稳定裕度优化等方法,研究了多智能体协同控制的记忆加速算法优化设计问题,取得了如下创新成果:
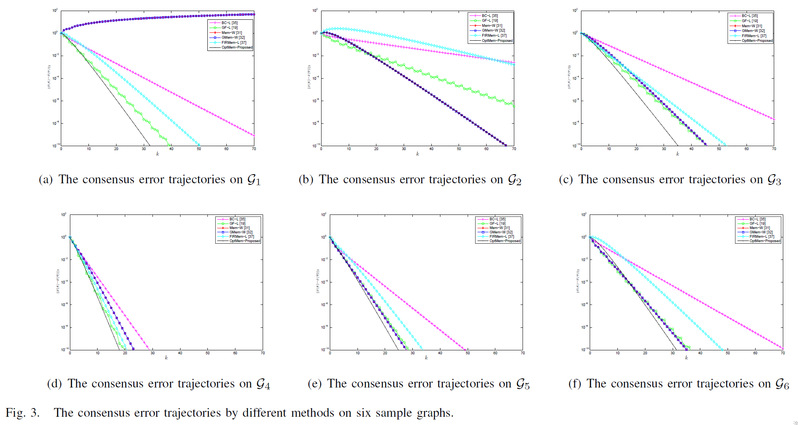
1) 给出了M-tap记忆加速算法实现平均一致的充分必要条件,将多智能体的快速一致问题转变为多个低阶系统的同时快速镇定问题,建立了收敛速率与控制参数的直接关系表达式,揭示了记忆项对收敛速率的影响。
2) 对短时记忆(
M< ="2
)的情况,给出了最快收敛速率和最优控制参数的精确解析表达式,发现了一步记忆和两步记忆的最快收敛速率完全相同,揭示了两步记忆加速算法并不能进一步提高收敛速率。
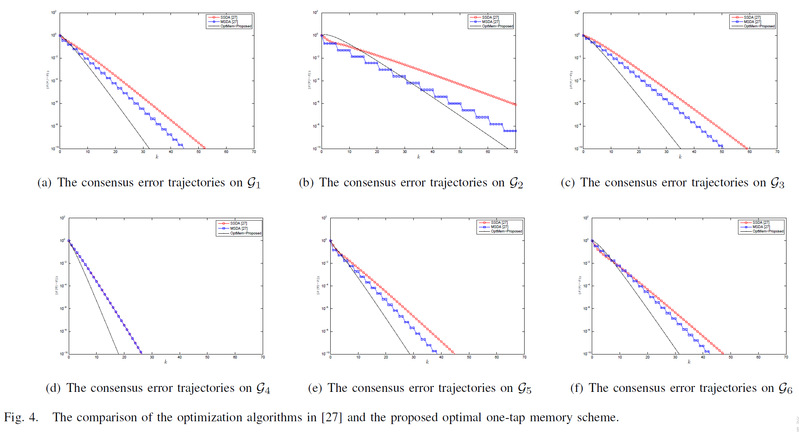
3) 提出并解决了未知拓扑下记忆加速算法在M>=1情况下的优化设计问题,给出了最快收敛速率和最优控制参数的显式公式,证明了算法收敛速率最坏情况最优的性能极限是M=1,这说明了一步记忆加速算法就能达到收敛速率优化上限。
最新研究成果被控制领域国际顶级期刊IEEE Transactions on Automatic Control录用为长文(https://ieeexplore.ieee.org/document/10066203)。研究工作首次解析求解了
M>=1
的记忆加速算法优化设计的难题,反直觉地发现了并不是记忆信息越多收敛速率越快,提供了在记忆加速算法下的最快收敛速率和最优控制参数的解析求解方法,给出了算法收敛速率优化上限的显示表达式和工程实现方法。该项研究结果为解决相关的算法收敛速率分析与优化问题提供了新的思路和方法,对群集智能无人系统和分布式优化计算有重要的科学意义。